
こんにちは。
広島大学体育会自動車部です。
突然ですがCASEというワードを聞いたこと、知っているという人はいるでしょうか?
今回は100年に1度といわれている自動車業界の変革期のキーワードである「CASE」について説明したいと思います。
CASEは2016年にドイツのダイムラー社(メルセデスベンツ・スマートなどのグループ企業)のCEOが提唱した造語であり
C「Connected…コネクテッド化」
A「Autonomous…自動化」
S「Share&Service…シェアリング&サービス化」
E「Electric…電動化」
の4ワードの頭文字をとったものであり、このCASEの波に乗り変革期にいかにうまく対処するかが自動車メーカーの発展、後退を左右するカギになってくると思います。
Connect…連結する、つなぐ、接続する、連絡する(webio英和和英辞書より)というように何かと何かをつなぐ技術で、例えば車を運転中にBluetoothで接続して音楽を聴いたり、ハンズフリー会話をしたりする「車(車のナビなど)」と「スマートフォン」をつなぐことがあると思います。
これも身近なコネクテッド技術です。
そして現在アメリカのテスラモーターズでは、スマートフォンのように様々な機能がアップデートを通して追加されており、例えばあらかじめ完全自動運転のオプションがついた車にアップデートを通じて駐車場内の半径約60m以内であれば自分のいるところまで車を自動運転で呼び出す「Smart Summon」が追加されたり、車内のインフォテイメントシステムでアップデートを通じてYouTubeやNetflixなどを楽しめたりできる「車」と「インターネット」つながりなどがあります。
そして自分の理想の一つとして例えば数百メートル先の車が得た死角に人や車がいる、信号が今変わったなどといった情報を車と車がやり取りを行うことで安全でスムーズな運転を可能にしたりするなど車での移動を快適する多くの可能性をコネクテッド技術は秘めていると思います。
「2020年度より一定条件下での自動運転レベル3搭載車の承認へ…」など新聞やネット記事の見出し等でレベル○といった段階が設定されているのを見たことがあると思いますがこのレベル分けについてはレベル1~レベル5まであり次のような分け方になっています。
レベル1…システムがアクセルとブレーキ操作またはハンドル操作のどちらかを行い、前走車との距離をレーダーやカメラで計測してシステムが加減速を行い、距離を一定に保つ機能であるアダプティブ・クルーズ・コントロール(ACC)や車線を認識して車線をはみ出さないようにハンドル操作を行うレーンキープアシスト(LKA)といった機能のいずれか1つを担うのがレベル1です。基本的にACCかLKAのどちらかしか搭載していない車となります。
レベル2…前述のACCやLKAなどの両方をシステムが担います。どちらか片方ではなく両方を同時に行うのがレベル1との違いです。
レベル3…レベル3では一定条件下で運転者が常に周りの状況等を監視している状態での自動運転で、語弊を恐れずに簡単に言うと手放し運転が可能になります。
操作もシステムが主体となって行いますが、緊急時やシステムが自動運転の継続を困難と判断した場合には運転者は速やかに運転操作を行う必要があります。
レベル3に関しては2020年1月現在では実用化されていませんがホンダが2020年の夏ごろにレベル3のシステムを搭載した車両の販売を発表していますが、法改正によりレベル3システム作動中はスマートフォンやテレビの視聴等が可能になっており、先ほども述べたように緊急時などそのような状態で本当にドライバーが運転操作にすぐに復帰して対応できるのかなど疑問が多く残るところもあります。
レベル4…レベル4はある条件下でシステムがすべての運転を担い、システムの作動が困難な場合でも限定領域においてある程度実行。
レベル4から運転の主体、責任ともにシステムが担うことになります。
レベル5…システムがすべての運転操作を実行し、作動困難な場合でも関係なくシステムが運転を担い、運転者の対応を全く必要としなくなります。
実は自分が今使っている車(スバル レガシィツーリングワゴン)にアダプティブクルーズコントロール(ACC)の機能がついています。
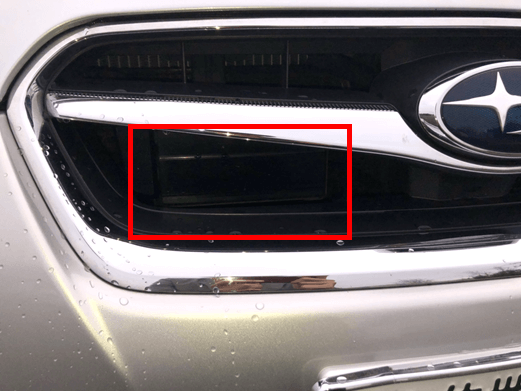
スバルなのでアイサイトと思われたかもしれないですが、アイサイトがデビューする前のシステムでSIレーダークルーズコントロールというものです。レーダークルーズコントロールというようにアイサイトのようなステレオカメラによる車間距離の計測ではなくフロントグリル内にもうけられているレーザーレーダーによって車間距離を計測し前走車に0km/h~100km/hの範囲で追従してくれます。
ちなみにアダプティブクルーズコントロールはアダプティブ(適応できる)という意味のように前走車との距離をレーダーが発信してから戻ってくるまでの時間を計測し、レーダーの波の速さ(一定)に時間を掛け算し距離を求めることを繰り返し、適切な距離を保てるようにアクセルとブレーキを自動で調整するもので定速クルーズコントロールに比べて非常に便利です。
写真はフロントグリル内に設けられたレーダーシステムで赤い枠の部分にあります。
自動車の運転支援システムに使われるレーダーについては主にレーザーレーダーとミリ波レーダーがありますが、レーザーレーダーは雨や汚れなどに弱く、ミリ波レーダーが現在は多くの車種で採用されています。
しかしミリ波レーダーのシステムはレーザーレーダーにくらべて場所をとるため、小型のコンパクトカーなどにはレーザーレーダーが採用されているケースもあります。
次の写真はACC用のステアリングスイッチの写真で上側4つの左上のボタンで車間距離を3段階設定できます。
高速道路などの自動車専用道路で長距離を走る際などACCを設定すればペダルワークの回数が減り疲労を軽減でき、とても重宝するので1度使うと手放せないです(笑)。
また前走車がいなくても前走車が現れるまでは定速でクルーズコントロールが作動するので無駄なペダルワークが減ることで燃費の向上にもつながると思います。
これまで自動運転のレベル分けやACCの紹介を行ってきましたが、自動運転について自分は正直にいうと否定的です。
自分は自動車が大好きなので自分で車を操ってなんぼという考えももちろんありますが、レベル4、5相当の自動運転車について、責任はシステム側にあるとされていますがシステムのどこに問題があるのか例えばカメラやセンサー類なのか、演算処理を行うユニットの問題なのか…など問題の原因の発見がとても複雑になると思いますし、そもそもそのような車に本当に乗ろうとする人すなわちお金を出す人が多くいるのでしょうか?
物珍しさに購入するような人がいるかもしれませんが全てをシステムに任せて乗客全員が別のことに集中するようなことは普通の人だったらまず怖くてできないと思います。
ただ高齢化社会の今、移動手段を必要としていても公共交通機関が充実していなかったりするなどしてどうしても車を所有する必要がある方々が多くいらっしゃると思います。
そのような方々のための移動手段としての自動運転車の活用などは大いに賛成です。
自動運転車はあくまでもどうしても必要な時に活用して、それ以外はあくまでもドライバーが主体でヒューマンエラーを限りなく少なくするための運転支援システムにとどめておくのが良いのではないかと思います。
MaaS(Mobility as a service)移動のサービス化というまた新しい単語が出てきましたが、車を所有するのではなくライドシェア(相乗り)やカーシェアリングなどのサービスを利用するというものでこれも自動運転と組み合わせることで前述した公共交通機関が乏しい地域などへのニーズに対応できると注目されています。
また車はそのライフサイクルの90%を駐車場で過ごしているなど客観的にみるとあまり効率的ではないのかもしれません。
例えばトヨタは自動車を作る会社ではなくモビリティカンパニーすなわち車を売るだけではなく上記のような車を通したサービスを提供するなどモノだけでなくモノを含めたサービスを提供することで、車を所有する価値ではなく車を通じたサービスを体験することで得られる価値を感じてもらうことを重点に置いていくと思います。
CASEの中でも比較的身近な話題で国内、海外問わず多くのメーカーが続々とEVを発表、発売しています。
これはやはりEUや中国のCASEやNEV規制に対応するためのものが多いのが現状です。
CASEは企業別平均燃費基準の略で車種ごとではなくメーカー全体の車種での平均燃費を算出し欧州ではCO₂の排出の平均値を算出し、基準を達成する必要があります。
基準を達成できないとクレジットといういわゆる罰金を支払わなければなりません。
2020年度からの95g/km規制は純粋な内燃機関車はどのメーカーも達成できておらずハイブリッド車やプラグインハイブリッド車などしかクリアできないということになります。
そして日本でも2030年度までに2016年度の燃費基準に対して32.4%の改善を求める新燃費基準を示しました。
具体的な燃費は2030年度には25.4km/Lとなるのでこの値もハイブリッド車でないとクリアできません。
EVに関して、車自体はゼロエミッションですが電気を作る時、すなわち発電所等で排出されるCO₂などを加味して排出量の値が産出されるそうです。
この、車だけの視点で排出物等の環境への影響を考えるのではなく燃料の採掘から実際にガソリンとして精製され燃料として車で使われるまでのすべての工程での環境への影響を考慮する考えを「well to wheel」と言います。
EVはwell to wheelの視点で考えると例えば再生可能エネルギーが普及すれば限りなくゼロに近い排出量を目指せると思いますし、自分はEVと再生可能エネルギーの組み合わせが最も理想的だとは思うのですが、中々そうはいかず再生可能エネルギーはほかの発電方法に比べてコスト、安定性の面から不安が多く、またEVに関しても課題が多く具体的には航続距離の少なさ、バッテリーに使用されるレアアースの確保とその採掘時の環境への影響などがあります。
そのため現実にはHVやPHV、レンジエクステンダーなどの数を増やすのが最適な答えなのかもしれません。
CASEによって車に対する考えや価値観ががらりと変わるかもしれません。
しかし最終的にどのような車に乗るか、買うかを決めるのは私たち消費者であって、私たちの選択が今後の自動車の在り方を決めていくのだと思います。
どんなにいい技術が搭載され、どんなに環境にやさしい車を作っても人々が買わなければ意味を成すことはありません。
限られた時間やコストの中で最適な答えを見つけていい車を作ることができるメーカーがCASE時代を生き抜くことができるのかもしれません。
執筆:広島大学体育会自動車部