
「トルクベース制御」という単語を聞いたことはございますか。
なかなか表に出てくる話題ではないので、耳馴染みが薄いと思いますが、現代の自動車には必要不可欠な存在です。
“リクエストトルクマップ”と呼ばれたり、“総合トルク制御”と呼ばれることもあり、単語として表に出てくるのはこれからでしょう。
今回は「トルクベース制御」についてお話します。
トルクベース制御を理解するのに多くの技術が関与してきます。
まず、その一つ、電子制御スロットルです。
電子制御スロットル(以下、電スロ)、スロットルを電気の力で動かし、アクセルペダルとスロットルが直結していないシステムです。
旧来の自動車はアクセルペダルからワイヤーが伸び、スロットルバルブへと繋がっていました。アクセルペダルの操作がそのままスロットル、すなわちエンジンに入る吸入空気量をコントロールする操作となります。
時代と共にワイヤー式は廃れゆき、今現在販売されている乗用車で電スロを採用していない車種は存在しないというレベルで普及している技術です。
しかし、初期の電スロは評判が悪い物も多く存在しました。
高燃費を記録するために、アクセルペダルを50%踏んでいるのにスロットル開度は40%しか開かない、加速したくてアクセルペダルを一気に踏み込んだのにスロットルはゆっくりと開いていく、などドライバーの意図に反した動きを行っていたからです。
また、そもそもアクセルペダルの操作に対してタイムラグが発生するという問題もありました。
しかしながら電スロにもメリットはあり、例えば大排気量の下からトルクが沸き上がる車があるとします。
アクセルペダルを少し踏み込んだだけで一気にトルクが立ち上がり、街乗り領域ではギクシャクとした走りになってしまう事があります。
これを電スロに置き換えてみましょう。
アクセルペダルの操作が微量な街乗り領域にて、レスポンスやスロットル開度を意図してゆるやかにする事でスムーズに走行することが可能です。
電スロのメリットはそれだけでなく、車体自体の電子制御デバイスに必要不可欠なアイテムです。
スピン防止、ホイールスピン防止、などなど現代の車にはESPを代表とする、電子制御におけるセーフティ機能が非常に発達しています。
例えばホイールスピン防止を例にとってみましょう。
ドライバーはアクセルペダルを多量に操作し、ホイールスピンが発生します。
ワイヤー式スロットルではドライバーがホイールスピンを感知し自らアクセルを緩める、もしくはエンジン制御によりわざと燃焼させないことによりパワーを絞る。このような動作によりホイールスピンを抑制していました。燃焼させない制御は通常のエンジンコントロールとは違うため、ギクシャクとした動きにつながることもあります。
しかし電スロによる制御の場合、ホイールスピンを感知したコンピュータはスロットルを絞ることによりパワーを絞ります。この結果、ホイールスピンは抑制され安全に加速することが可能となります。
スロットルを開かないというのは通常のエンジン制御の一環なので、ギクシャクとすることもなく違和感も少なく済みます。
また、レーダーによる前走者との距離を維持したアダプティブクルーズコントロールなど、電子制御抜きでは現代の車を語ることはできません。
電スロが発達した頃には制御はより緻密に制御され、タイムラグも解決され、ドライバーの意図通りの操作が可能となりました。
そしてトルクベース制御を理解する上で次に理解すべきキーワード。
“CAN通信”です。
CAN通信という言葉が完ぺきに正しいというわけではないのですが、一つのキーワードとして使用します。
旧来の車がコンピュータを使い電子制御していたのはエンジン単体でした。燃調や点火タイミングなどです。
しかし電子制御技術はどんどん発達し、ATミッションの制御、ESPの制御、ABSの制御、はたまたステアリング系統の制御など、現代の車はありとあらゆる場所が電子制御されています。
制御技術がシンプルな頃は大きな問題にはなりませんでしたが、快適性や省燃費性が重要視され制御がどんどん細かく緻密になっていくと一つの問題が起きます。
各部のコンピュータが連携を取らず各々に制御をするため、ギクシャクとする場面が目立つようになりました。これはドライバー側の慣れで解決している部分でした。
しかし現代の車はどうでしょう。
例えば、ATミッション。
シフトアップ時にエンジントルクを絞ることで変速ショックを少なくする制御。
シフトダウン時にエンジンの回転合わせをし、シフトダウンをスムーズに行う制御。
ESPによるスピン抑制のためエンジントルクを絞る制御。
またABSとESPを連携させブレーキを各輪独立して制御することによって車体を安定させる制御。
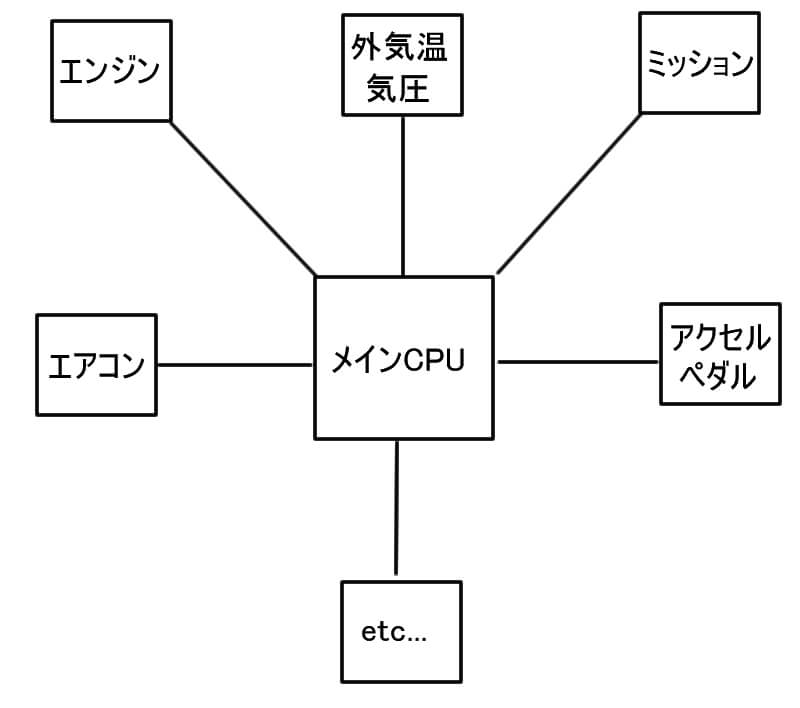
お気づきでしょうか、一か所の電子制御だけではなく、各パートが連携して制御をしているのです。
その結果、旧来は各パートごとに制御を行っていたものが、現代では各パートが連携し総合的に車体を制御するようになってきました。
“それがCAN通信”。
すべての車体制御コンピュータを連携させ総合的に車をコントロールする技術です。
(本来のCAN通信とはまた違った意味を持ちます。今回は自動車用語としてのCAN通信という言葉を使います。)
さてこのCAN通信。各パートが連携して車体を制御するようになりました。その結果問題になったのが、旧来の「空気吸入量をベースとしたエンジン制御」です。
電スロが採用される前、また電スロ初期の車は、「空気をどれだけ吸ったか」によってエンジン制御をしていました。吸った空気に対してもっとも効率の良い燃焼をさせてあげようという制御です。もっとも効率が良いということで聞こえはいいですが、車体制御においては不利になるケースが目立つようになりました。
先にあげたような、シフト時のエンジン回転数のコントロール、意図的にスロットルを絞った車体安定性の向上など。これらを解決する方法が必要となります。
ここまで読んだ皆さんならお気づきだと思います。
そう“電子制御スロットル”です。
電スロをCAN通信の中に組み込みこむことで総合的に車体をコントロールするような制御へと進化しました。
しかし電スロであっても空気吸入量で制御するのではこれまでとは変わりません。
そこで出てくる言葉。お待たせしました「トルクベース制御」です。
「トルクベース制御」
一言で言えば、「その時に必要なトルクを発揮させるべく全ての制御パートをコントロールする」。
“何のことかわかりませんね。”
分かりやすい例え話で説明します。
あなたはトルクベース制御の車を運転しています。
高速道路の乗り口へ入り、いざ合流という場面です。
あなたはアクセルペダルを踏みこみ加速する操作を行います。
この際「空気吸入量を増やしトルクを発揮させつつ、一つシフトを落とす事で合流加速するのに必要な加速を発揮させよう」と、あなたは思ったでしょうか?
違いますね。
ただ「加速するためにアクセルを踏み込んだ」。
これが正解ではないでしょうか。
この際の操作として考えられるパターンとしては、
“ギアはそのままで加速する”パターン。
“ギアを一つ落とし加速する”パターン。
“ギアを二つ以上落とし、さらなる加速をする”パターン。
加速をする。言葉では一言ですが、しかしながらひとえに合流加速といっても様々なパターンが存在します。
またその時の速度が速いか遅いか、登り勾配か下り勾配か、などなど条件も様々存在します。
これらをCAN通信ではなく、エンジンとミッションが個別に考えそれぞれが独自に答えを出したとしましょう。
電スロは、「加速するために空気をいっぱい吸わなきゃ!」と多く開きます。
エンジンは、「空気がいっぱい入ってきた!燃やさなきゃ!」と燃料を多く吹きます。
ミッションは、「加速だ!シフトダウンしてエンジン回転上げなきゃ!」とシフトダウンします。
これらがすべて同時に行われ、ドライバーは意図せぬ急激な加速を感じ、アクセルを戻す。
その結果としてまたスロットルは閉じ、エンジンは回転を上げず、ミッションはシフトアップをする。
ギクシャクの塊で助手席に座った人は、「荒波の日本海を渡る漁船のような酔い」を経験するでしょう。
これが旧来のトルクベースで制御されていない車です。
この当時の車は、人間の「慣れ」という優れた機能によって車はスムーズに走行していました。
さて、しかしながらあなたが今回運転しているのは幸運なことに、最新のトルクベース制御を行っている車。
アクセルを踏みこみ加速したいと車に伝えたその瞬間。
まずアクセルペダルから繋がった高性能な総合コンピュータは、「ドライバーがこれくらいのトルク(加速)を求めている!」と認識します。
そして総合コンピュータは「そのトルクを得るための最適解」を導き出します。
電スロ、エンジン、ミッション。
総合コンピュータは導き出した最適解を各パートに伝達し
●スロットル →少し多めに開く。
●エンジン →いつもより少しだけ燃費を落としてでもトルクを発揮。
●ミッション →一つシフトダウンすることで、ドライバーが望んだ加速を実現。
もちろんシフトダウンの際にエンジン回転を合わせる事も忘れていません。
ご理解いただけましたでしょうか。
“トルクベース制御”というのは、「ドライバーが今どれだけのトルクを必要としているか」を軸として「車体全体」を制御する方式の事なのです。
車体全体を総合制御するメリットは他にも生まれました。
低燃費性の向上です。
空気を吸い込む際にスロットルバルブというのは常に抵抗になっていました。
特に街中での巡航時のような少しだけ開いた場面では、大きな抵抗となっています。
“ポンピングロス”といいます。
ならばスロットルを常に大きく開けばいいのではと頭の良い人は考えました。
しかしながら大きく開けば空気も多く入り、その分トルクも発生し必要以上の速度が出てしまいます。
そこでトルクベース制御です。
ドライバーが求めるトルクに対して、スロットルは必要以上に多く開く。しかしエンジン側の制御でトルクを意図的に出さないようにする。
この結果、ドライバーが求めるトルクを発生しつつ、ポンピングロスは低減されるため低燃費が可能となりました。
お気づきの方もいるかもしれません。
トルクベース制御を説明するにあたって「ドライバーが求めるトルク」という言葉を多く使用しました。トルクベース制御とそれ以前では、アクセルペダルの意味が大きく変わっているのです。
旧来の制御ならば、アクセルペダルはトルク発生する量を調整するものでした。
しかしトルクベース制御のアクセルペダルとは「ドライバーが求めているトルクを感知するスイッチ」になっているのです。
アクセルペダルとスロットルが直結しているわけではない。
アクセルペダルがスロットルの開き具合を決めているのではない。
アクセルペダルは「総合コンピュータにドライバーの意図を伝えるための装置」なんです。
これは言葉以上に多くの意味を持ちます。
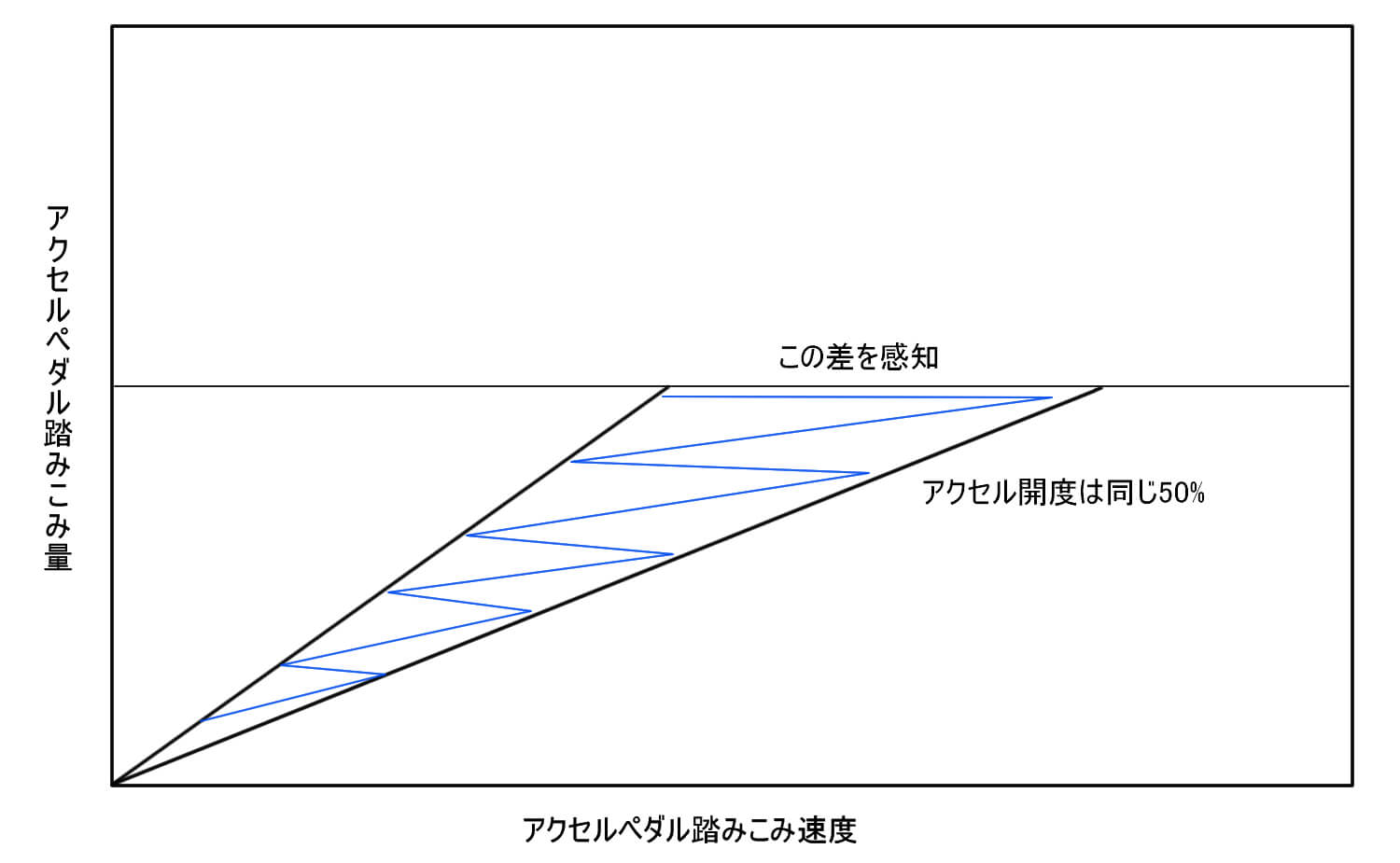
一つの例として、素早く50%のアクセル操作をした場合と、ゆっくりと50%のアクセル操作をした場合。
旧来のワイヤー式スロットルならば、スロットル開度が同じである以上、得られるトルクも同じでした。
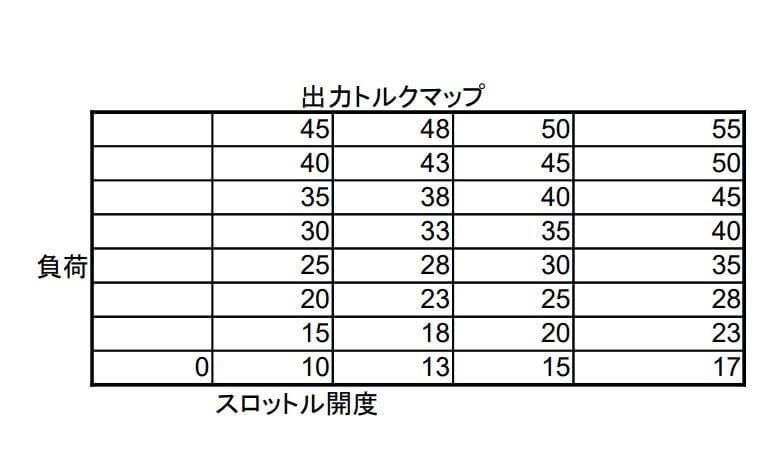
しかし、トルクベース制御の場合、総合コンピュータは素早く50%操作されたほうがトルクを必要と判断し、多くのトルクを発揮する制御をおこなうのです。
同じスロットル開度でも負荷が上がれば出力される数字は大きくなる。
もちろんこれはドライバーの意図を正確に読み取るマップ作りがあってこそ。ここでの差がドライバーの意のままに操れる車かどうか、という差になってきます。
ドライバーが車に慣れる、技量が運転を左右する。
それは昔の話となりつつあります。
現代の制御技術が発達し、その結果として誰が乗っても安全に乗りやすく、そして低燃費を達成できる。
昔ながらの車に馴染んだ方には少し物足りないかもしれません。しかし車というものは着実に進化しているのです。
これからも、進化を楽しみにしたと思います。
(執筆:岐阜大学自動部)